
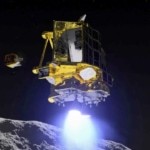
日本の宇宙航空研究開発機構(JAXA)は1月25日、小型月着陸実証機「SLIM」および、2機の小型ロボット型探査機による月面活動内容と、すばらしい成果報告をYouTubeでのライブ放送で行った。

画像: LEV-1、LEV-2無線局の試験電波データ転送により取得した試験画像 credit by©JAXA/タカラトミー/ソニーグループ㈱/同志社大学
今回の成果発表では、詳細なドキュメントを元に説明がなされ、ミッションの状況がとてもよく理解できた。
興味のある方は、発表に使用されたPDFドキュメントが公開されているので、参照されたい。
本稿では、JAXAの公式YouTubeチャンネルで公開されたライブ配信の内容と、ドキュメントに書かれている内容を、筆者なりにわかりやすくまとめてみたので、ぜひご覧いただきたい。
ミッション全体としての報告概要
JAXAによるミッション全体としての報告内容は、概ね次の通りだ。
1. 2024年1月20日、国立研究開発法人宇宙航空研究開発機構(JAXA)が小型月着陸実証機(SLIM)を月面に着陸させ、地球との通信を確立。
2. 着陸時の姿勢が計画と異なり、太陽電池からの発電ができず、同日に地上からのコマンドで探査機の電源を切断。
3. 分析の結果、SLIMは目標地点から東に55mの位置に到達。ピンポイント着陸精度は10m以下と評価。
4. 航法誘導データや画像データなど技術データは全て取得。小型プローブの放出やマルチバンド分光カメラの試験運用も成功。
5. 高度50m地点でエンジン1基が推力を失う異常発生。残りのエンジンで降下を継続し月面に接地。
6. 太陽電池の向きから、月面での発電再開の可能性あり。原因究明とともに復旧への準備を進める。
達成できたこと、できなかったこと
達成できたこと:
1. SLIMを月面に着陸させ、地球との通信を確立
2. 目標地点から55mほど東に到達
3. ピンポイント着陸精度は10m以下と評価
4. 航法誘導データや画像データなど技術データを全て取得
5. 小型プローブの放出や分光カメラの試験運用に成功
達成できなかったこと:
1. 計画通りの着陸姿勢をとれず、太陽電池からの発電ができず
2. 目標地点と完全一致のピンポイント着陸ができず、55mずれた
3. 接地後の活動を継続できず、電源を切断
4. メインエンジンの異常で着陸時の姿勢が乱れた
課題と今後の予定
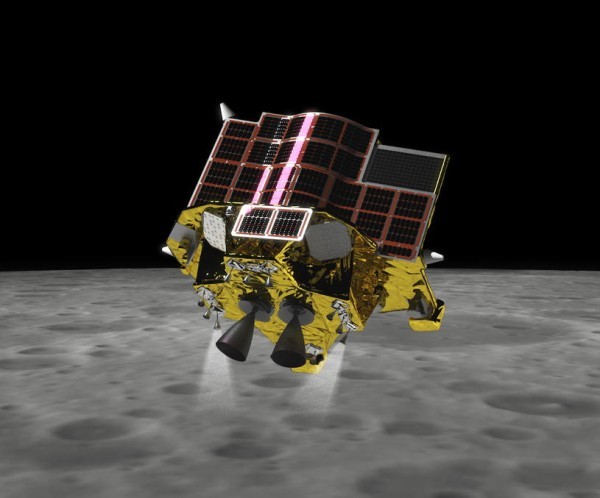
画像: 日本の小型月着陸実証機(ムーンスナイパー) credit by NASA.
課題:
1. 着陸時の姿勢制御の精度向上
2. メインエンジンの異常原因究明と対策
3. 太陽電池の向きに左右されない電力確保
今後の予定:
1. 取得データの詳細分析
2. エンジン異常の原因調査
3. 太陽光発電の可能性追求
4. SLIMの復旧準備
5. 月面での活動再開に向けた検討
つまり、データ分析と原因究明を進めつつ、月面での電力確保とSLIMの復旧に向けた取り組みが、課題と今後の予定の柱となる。
超小型月面ローバLEV-1の月面での活動結果に関する報告
SLIMミッションに搭載された超小型月面ローバLEV-1の月面での活動結果に関する報告のポイントは以下のとおりだ。
1. LEV-1は1月20日にSLIMから分離し、月面に着陸した。
2. 1時間51分以上にわたって月面で活動。ホッピングによる移動、地球との直接通信等を達成。
3. 6回のホッピングと車輪の回転を確認。完全自律機能も実証。
4. S帯とUHF帯での通信に成功し、地球局と月面ロボット間の通信を実現。
5. 電力を使い切ったため現在は待機中。太陽光発電による再起動の可能性がある。
6. 撮像データは未確認。今後も受信監視を継続する。
7. 獲得した技術は50kg級ローバ等の将来ミッションに活用される。
8. LEV-1は小型月面ローバとして一定の目標を達成した。
超小型月面ローバLEV-2の月面での活動結果に関する報告
SLIMミッションに搭載された超小型月面ローバLEV-2の月面での活動結果に関する報告のポイントは以下のとおりだ。
1. LEV-2はSLIMから分離し、月面に展開して自律的にSLIM周辺を移動した。
2. 前後のカメラでSLIMや周辺環境を撮影し、LEV-1に画像を送信した。
3. LEV-1から地球にデータを転送し、LEV-2の画像を受信することに成功した。
4. 画像からLEV-2の展開、SLIM検出、画像処理アルゴリズム等が正常に作動したことを確認。
5. LEV-1とLEV-2が世界初の完全自律月面ロボット、複数ロボットによる同時月面探査を実現。
6. 残データの解析により詳細な活動履歴を特定し、将来ミッションに活かす。
7. LEV-2は世界最小・最軽量の月面ロボットを実証した。
さいごに
JAXAは、「まだ分析途中であり。。」としつつも、多くの成果を報告してくれた。
この成果には、世界中が驚くはずだ。
探査機大好きな筆者は、会見途中で、鳥肌が立ってしまったほどだ。
それぞれの機体(SLIM、LEV-1、LEV-2)が協力しあって、成果を地球に送信するなど、日本らしさもアピールできたと思う。
筆者が個人的に興味を持っているのは、小型変形ロボットのLEV-2(愛称:SORA-Q)だが、この子が送った、SLIMがひっくり返った画像を見て驚いた。(冒頭の画像がそれ)
このSLIMの全体画像のおかげで、想定ではなく、現実に太陽電池パネルの方向が確認できたため、パネルに太陽光が当たる可能性が大いに期待できるのだ。
本来は、数日間の探査・観測で終了するはずの本ミッションだったが、SLIMが発電を開始するのを待って休止し、さらなる探査に備えて待機することになった。
次回の報告を期待したい。
※小型月着陸実証機(SLIM)および小型プローブ(LEV)の月面着陸の結果・成果等 の記者会見 – YouTube
















この記事へのコメントはありません。